MPU-6050姿态解算和数据融合
本小节对 MPU-6050 传感器的原始数据进行姿态解算,然后再利用数据融合算法得到精准的角度。
在上两小节中,我们已经读到 MPU-6050 传感器的原始数据,学习了加速度传感器、陀螺仪的工作原理、姿态解算,并对互补滤波有所了解。在本小节中,我们结合 STM32CubeMX、MDK-ARM 软件,对 MPU-6050 传感器数据进行姿态解算和数据融合。
具体步骤
进入我们上一小节修改过的 MiaowLabs-Demo 文件夹,再打开里面的 MDK-ARM 文件夹,找到 MiaowLabs-Demo.uvprojx 工程文件,双击,打开工程。在 MDK-ARM 工程界面,按下组合键 Ctrl+N(按住 Ctrl 键再按 N 键),新建一个文件,再按下组合键 Ctrl+S,文件名改为 filter.c,保存到 MiaowLabs-DEMO 的 Src 文件夹里,接着在 MDK-ARM 工程界面左侧 Project 栏目双击 Application/User 文件夹,把 filter.c 加进来。
双击 filter.c 源文件,敲入以下代码:
#include "filter.h"//加入头文件
//互补滤波器
// a = tau / (tau + dt)
// acc = 加速度传感器数据
// gyro = 陀螺仪数据
// dt = 运行周期
float angle;
float a;
float ComplementaryFilter(float acc, float gyro, float dt)
{
a = 0.98;
angle = a * (angle + gyro * dt) + (1 - a) * (acc);
return angle;
}
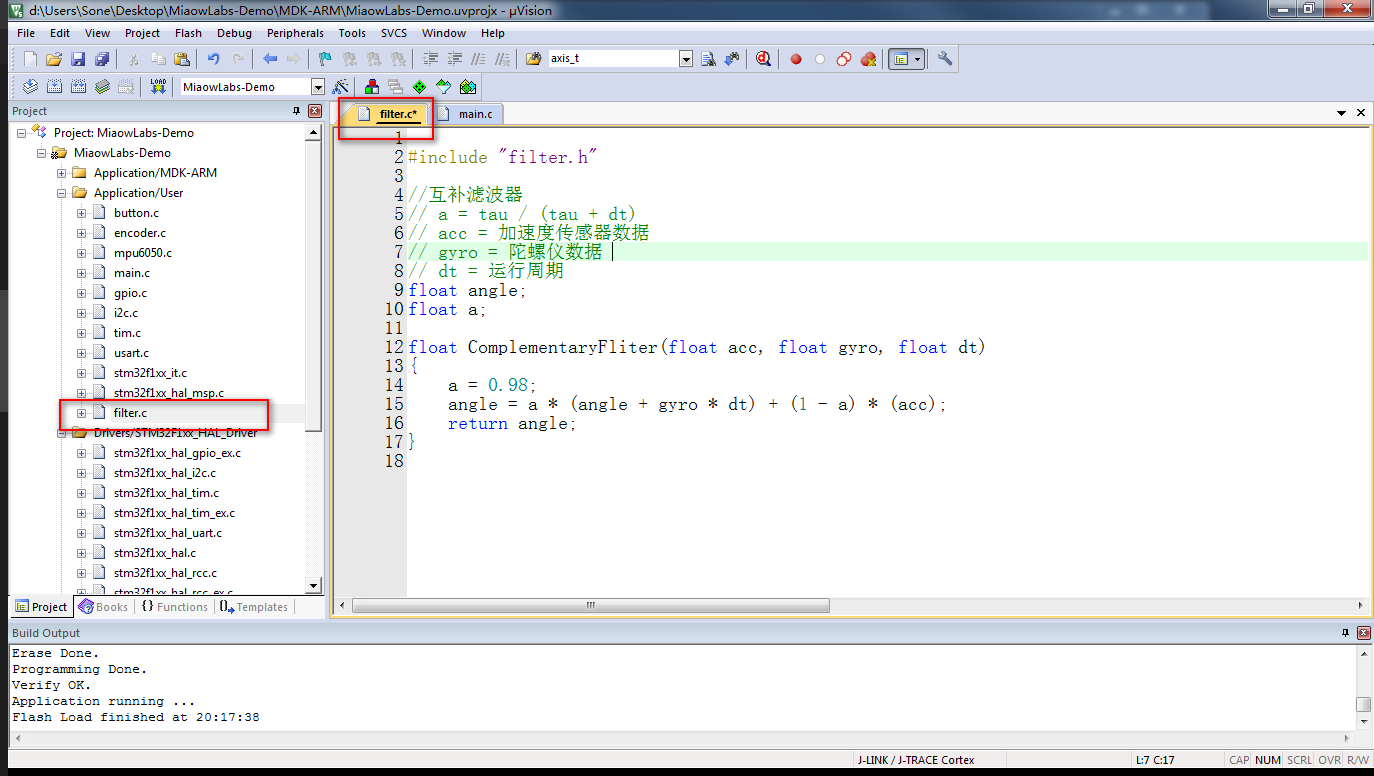
filter.c 源文件中暂时就只是封装了一个互补滤波的函数。
上面代码添加了头文件,但我们还没创建头文件呢,再新建一个文件 filter.h 头文件,把文件保存到 Inc 文件夹。然后,把下面代码敲进去。
#ifndef __FILTER_H
#define __FILTER_H
float ComplementaryFilter(float acc, float gyro, float dt);
#endif
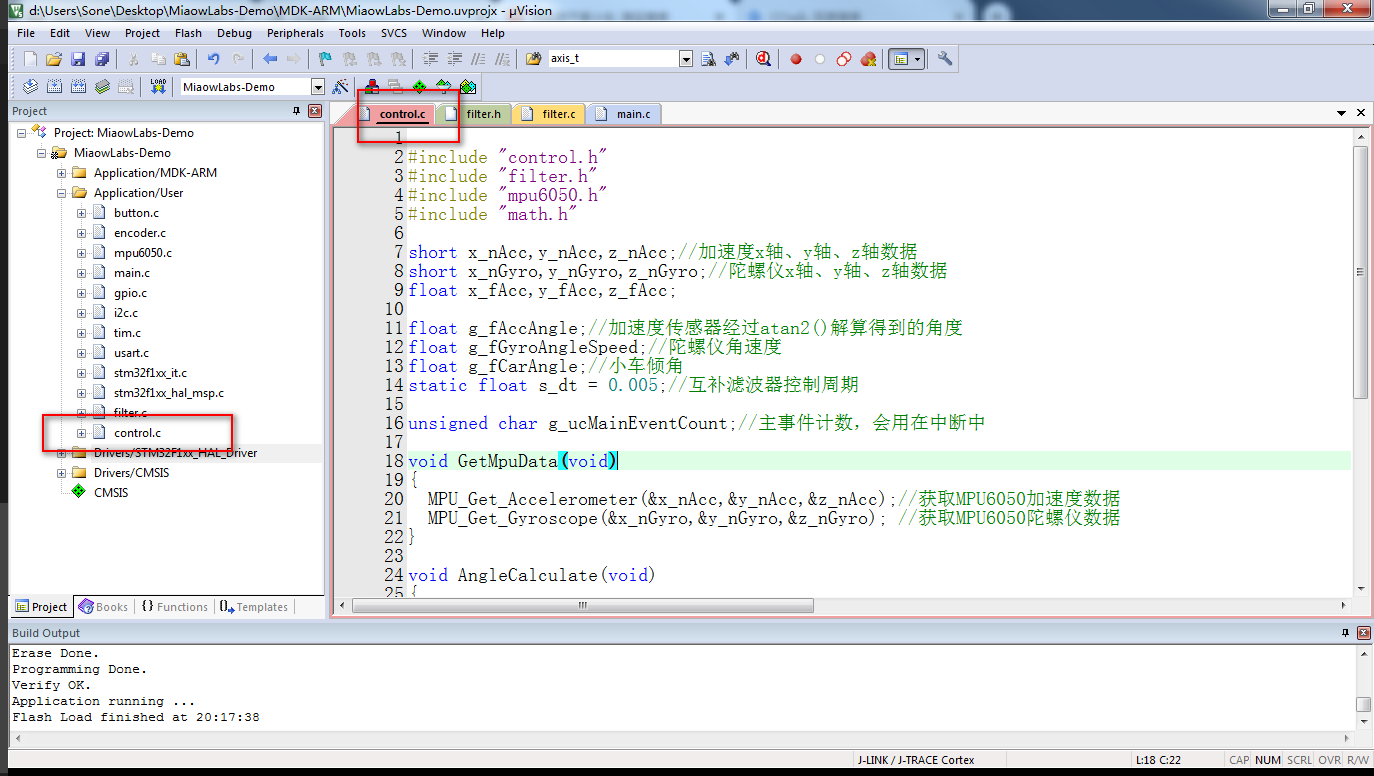
在 MDK-ARM 工程界面,按下组合键 Ctrl+N(按住 Ctrl 键再按 N 键),新建一个文件,再按下组合键 Ctrl+S,文件名改为 control.c,保存到 MiaowLabs-DEMO 的 Src 文件夹里,接着在 MDK-ARM 工程界面左侧 Project 栏目双击 Application/User 文件夹,把 control.c 加进来。
双击 control.c 源文件,敲入以下代码:
#include "control.h"
#include "filter.h"
#include "mpu6050.h"
#include "math.h"
short x_nAcc,y_nAcc,z_nAcc;//加速度x轴、y轴、z轴数据
short x_nGyro,y_nGyro,z_nGyro;//陀螺仪x轴、y轴、z轴数据
float x_fAcc,y_fAcc,z_fAcc;
float g_fAccAngle;//加速度传感器经过atan2()解算得到的角度
float g_fGyroAngleSpeed;//陀螺仪角速度
float g_fCarAngle;//小车倾角
float dt = 0.005;//互补滤波器控制周期
unsigned char g_ucMainEventCount;//主事件计数,会用在中断中
void GetMpuData(void)//获取MPU-6050数据函数
{
MPU_Get_Accelerometer(&x_nAcc,&y_nAcc,&z_nAcc);//获取MPU-6050加速度数据
MPU_Get_Gyroscope(&x_nGyro,&y_nGyro,&z_nGyro); //获取MPU-6050陀螺仪数据
}
void AngleCalculate(void)//角度计算函数
{
//-------加速度数据处理--------------------------
//量程为±2g时,灵敏度:16384 LSB/g
x_fAcc = x_nAcc / 16384.0;
y_fAcc = y_nAcc / 16384.0;
z_fAcc = z_nAcc / 16384.0;
g_fAccAngle = atan2(y_fAcc,z_fAcc) * 180.0 / 3.14;
//-------陀螺仪数据处理-------------------------
//范围为2000deg/s时,换算关系:16.4 LSB/(deg/s)
g_fGyroAngleSpeed = x_nGyro / 16.4;//计算角速度值
//-------互补滤波---------------
g_fCarAngle = ComplementaryFilter(g_fAccAngle, g_fGyroAngleSpeed, dt);
}
函数 GetMpuData() 的主要作用,就是分别获取 MPU-6050 传感器的三轴加速度、三轴陀螺仪数据,并将数据存入 x_nAcc、y_nAcc、z_nAcc、x_nGyro、y_nGyro、z_nGyro 变量中。
函数 AngleCalculate() 的主要作用,就是先将加速度数据除于灵敏度,将加速度数据由 LSB 转化成 g,注意这时变量类型为了保持精度为使用了 float 类型,再使用 atan2() 函数计算出角度,这时的角度单位为弧度,先除 3.14 再乘 180°,将单位转换成我们日常用的度。然后,将陀螺仪数据除于灵敏度,得到角速度,单位为 deg/s。最后,将加速度初算的角度和陀螺仪角速度送入互补滤波器进行数据融合,得到最终的稳定的精准的小车倾角。
注意这里我们定义 dt = 0.005,即 5ms,要怎么样才能实现精准的 5ms 运行一次呢?放在主循环中是不可靠的,因为按顺序运行,无法精确地控制时间。唯有靠定时中断,我们可以将关键代码放在我们先前用过的 SysTick_Handler() 滴答定时器中断服务函数中,以期实现精准的运行。
注意到上面代码已经添加了 math.h 头文件。只有添加 math.h 头文件,才可以正常使用 atan2() 反正切函数。
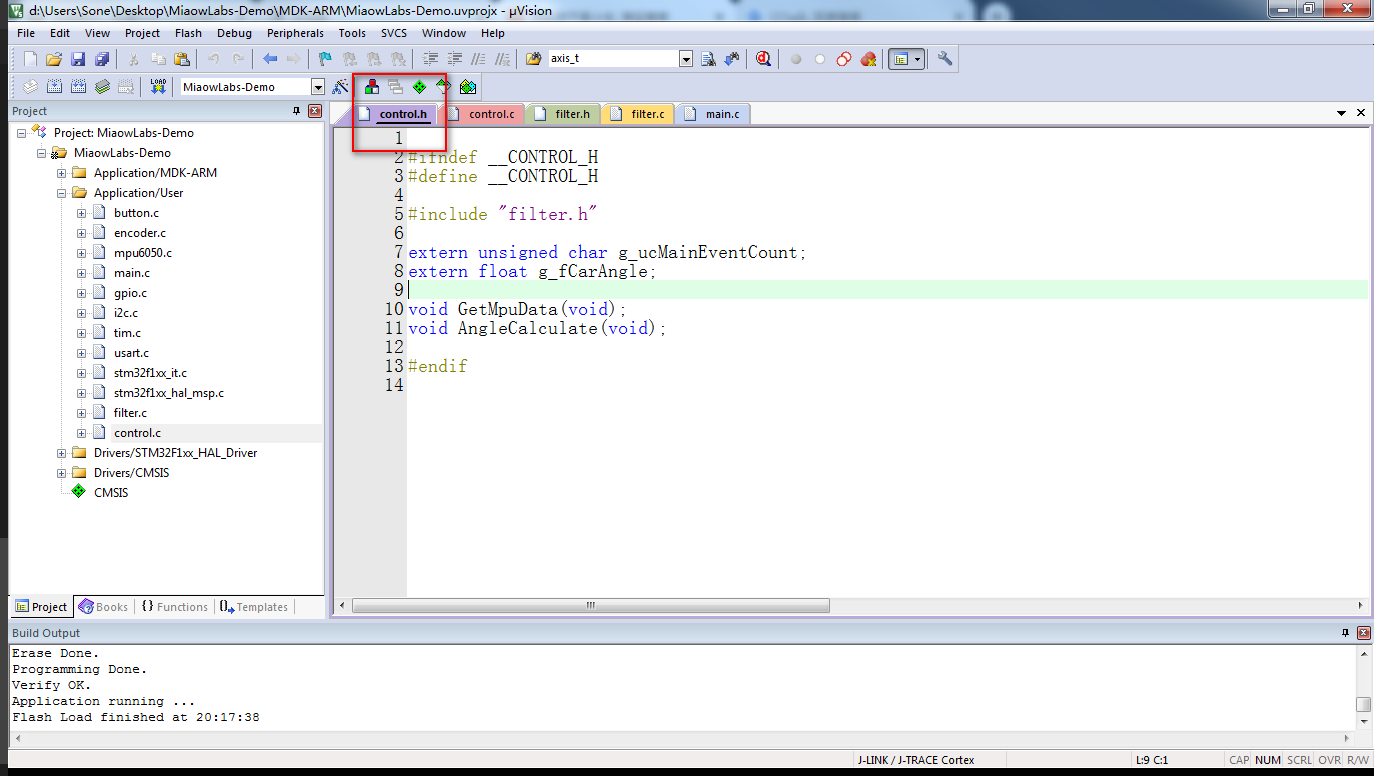
再新建一个文件 control.h 头文件,把文件保存到 Inc 文件夹。然后,把下面代码敲进去:
#ifndef __CONTROL_H
#define __CONTROL_H
#include "filter.h"
extern unsigned char g_ucMainEventCount;
extern float g_fCarAngle;
void GetMpuData(void);
void AngleCalculate(void);
#endif
打开 main.h 头文件,将 control.h 头文件添加进去。
#include "control.h"
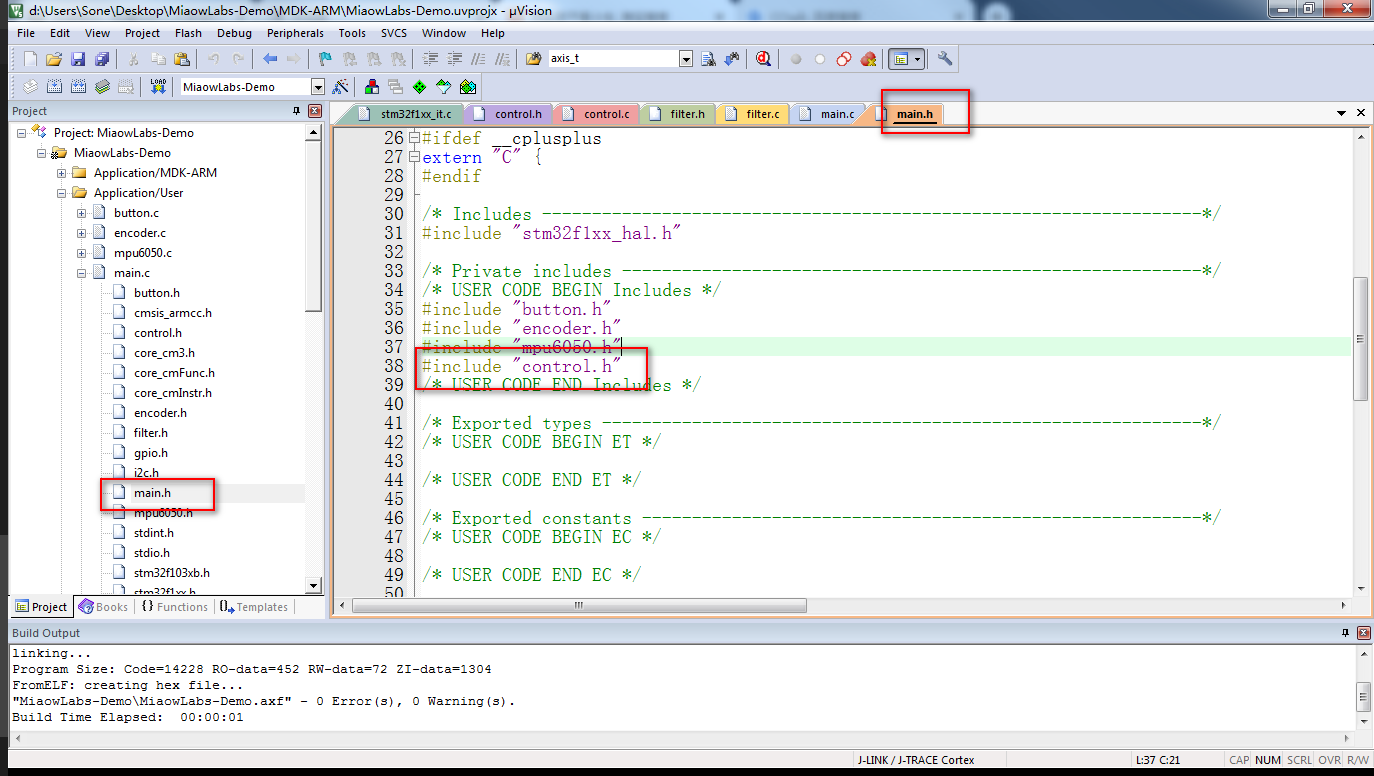
这里不把 filter.h 头文件添加进去,我们已经在 control.h 里面包含了 filter.h 头文件,因此不必在这里再重复添加。
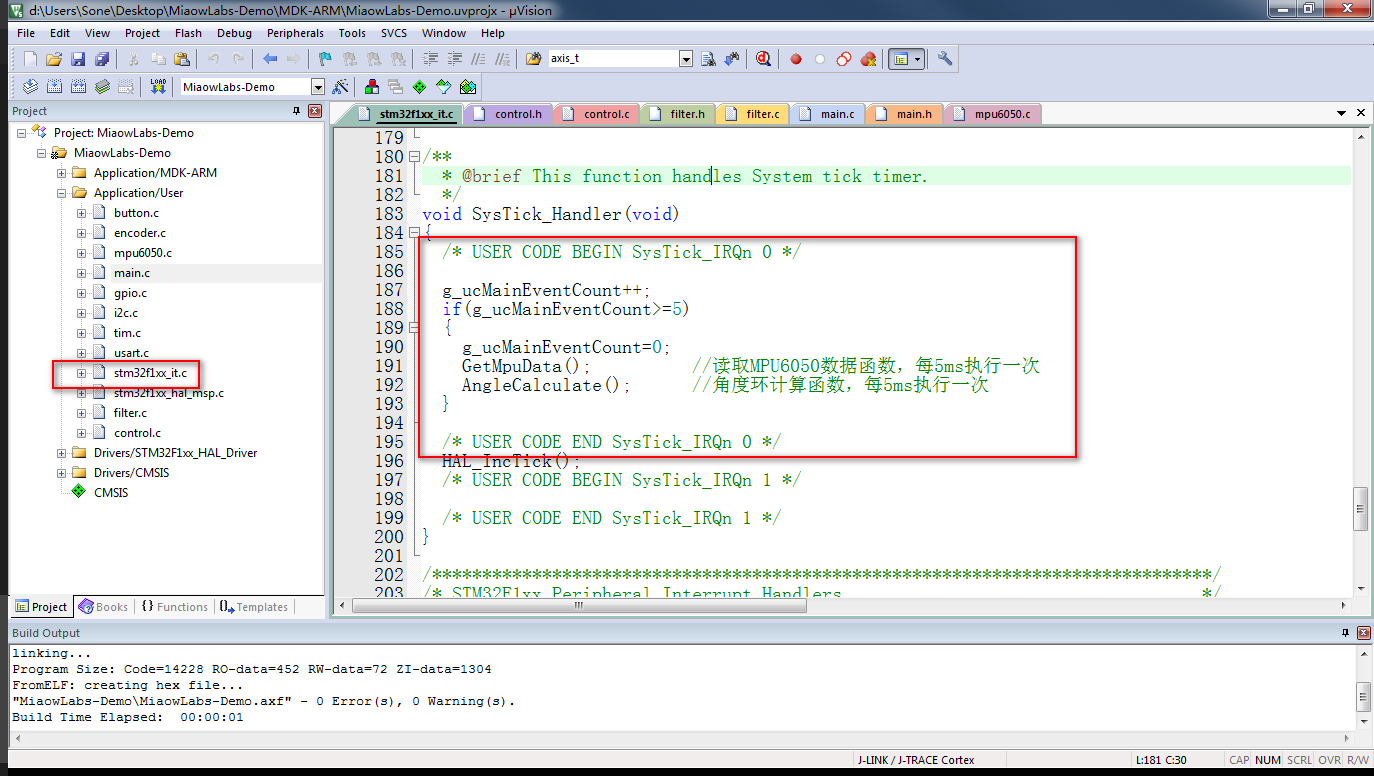
在 MDK-ARM 左侧 Application/User 文件夹中,找到 stm32f1xx_it.c 源文件,双击打开,将以下代码敲入 SysTick_Handler() 函数中:
/* USER CODE BEGIN SysTick_IRQn 0 */
g_ucMainEventCount++;
if(g_ucMainEventCount>=5)
{
g_ucMainEventCount=0;
GetMpuData(); //读取MPU6050数据函数,每5ms执行一次
AngleCalculate(); //角度环计算函数,每5ms执行一次
}
/* USER CODE END SysTick_IRQn 0 */
在 main.c 主循环中添加以下代码:
printf("小车角度 = %f",g_fCarAngle);//打印实时角度
HAL_Delay(500);//延时0.5s,防止打印发送数据太快
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//指示灯
点击编译按钮,重新进行编译,这时没有报错。但是烧录代码会发现不仅数据发送不出,甚至连指示灯都不闪烁。
注意中断服务函数里的代码:
/* USER CODE BEGIN SysTick_IRQn 0 */
g_ucMainEventCount++;
if(g_ucMainEventCount>=5)
{
g_ucMainEventCount=0;
GetMpuData(); //读取MPU6050数据函数,每5ms执行一次
AngleCalculate(); //角度环计算函数,每5ms执行一次
}
/* USER CODE END SysTick_IRQn 0 */
因为这段代码是在 1ms 内运行完,所以要确保函数 GetMpuData() 和 AngleCalculate() 能在 1ms 内就运行完毕。
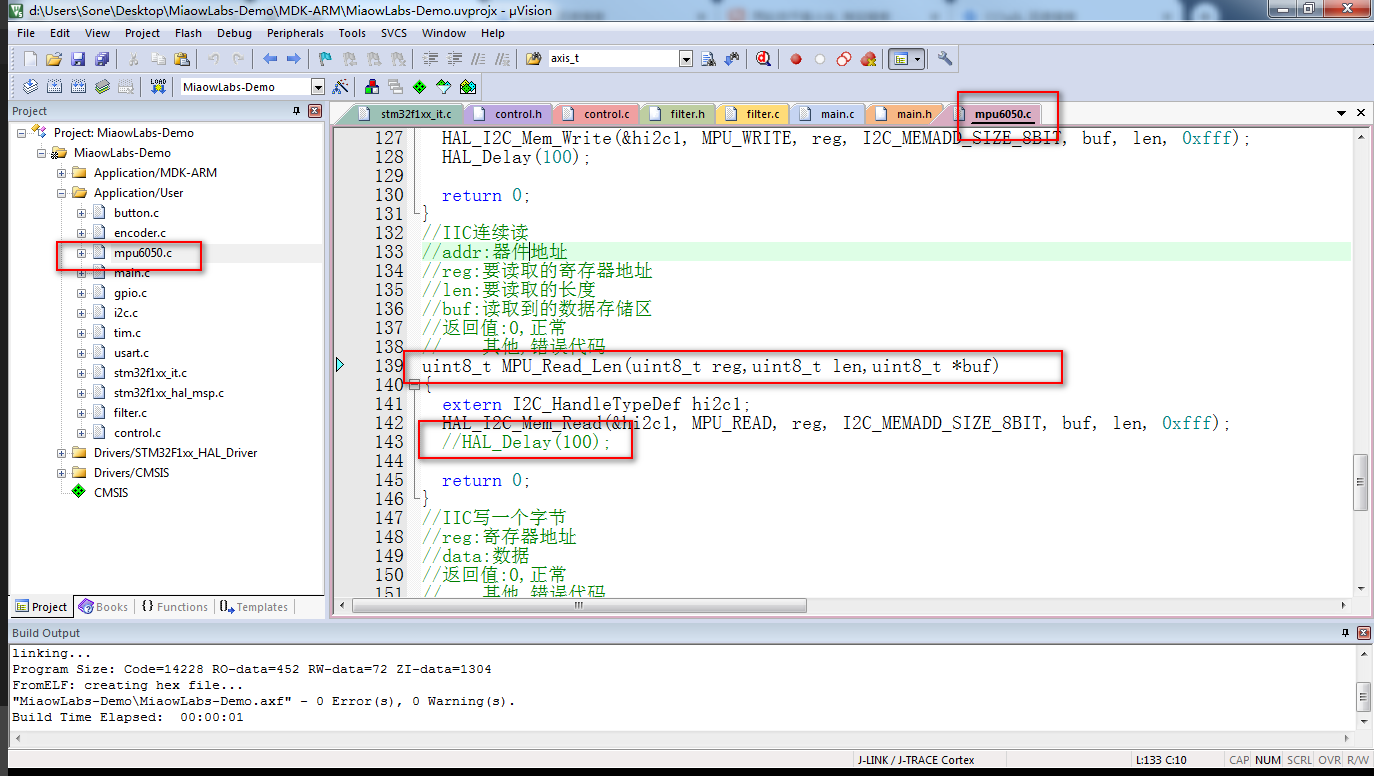
而函数 GetMpuData() 里面的 函数 MPU_Get_Accelerometer() 和 MPU_Get_Gyroscope() 都调用了 MPU_Read_Len() 这个函数,里面有一句延时代码 HAL_Delay(100);。也就是说,运行完这段代码要 100ms+ 的时间,在 1ms 中断里根本运行不完,压根没有时间给到主循环执行其他代码,所以发送不出数据,指示灯也不闪。
我们将延时函数 HAL_Delay(100); 注释掉,加快 I2C 读取速度,并不影响 I2C 正常工作。
点击编译按钮,重新进行编译,这时没有报错。将代码烧录进小车中,会看到指示灯每 0.5s 闪烁一次。
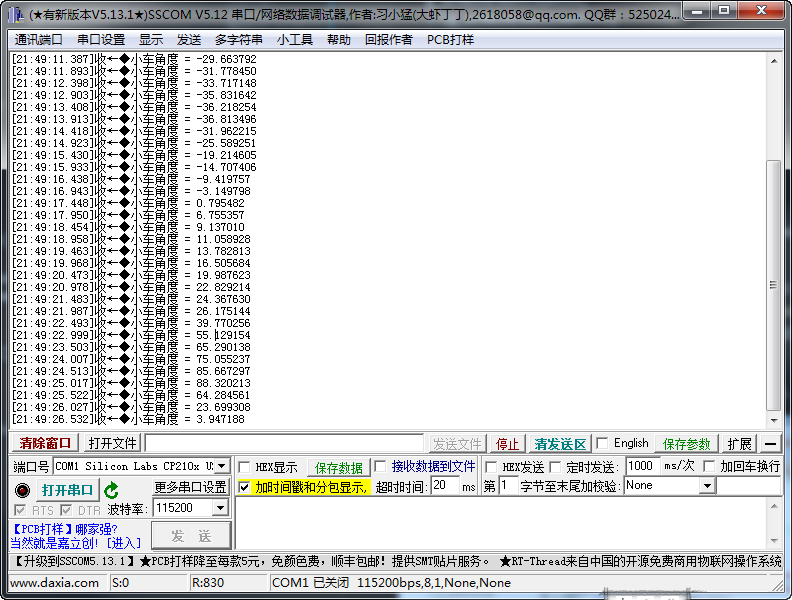
插上 Micro-USB 数据线,打开串口助手,可以看到随着小车倾斜角度变化,发送到串口助手上的数据也随之变化。
使用喵呜地面站
使用 printf() 函数打印输出角度到串口助手上,虽然可以看到大致的角度效果,但不够直观,而且无法看到加速度、陀螺仪、融合后的角度之间的联系。接下来,我们将加速度、陀螺仪、角度等参数,通过曲线波形输出,更加直观地观察数据之间的关系。
喵呜地面站就是一款虚拟示波器软件,支持多通道数据显示,波特率最大可以稳定上到 912600bps,还可以对图形进行缩放和拖动,是调试平衡小车的利器,而且使用起来也非常方便。界面如下所示。

喵呜地面站的使用方法非常简单,只需发送指定格式数据即可:每一行必须以“$”开头,以“;”结尾。这些值必须以空格分隔。
示例:
printf("$%d %d;", rawData, filteredData);
wait_ms(10);
下面我们进行具体的步骤讲解。
进入 MiaowLabs-Demo 文件夹,再打开里面的 MDK-ARM 文件夹,找到 MiaowLabs-Demo.uvprojx 工程文件,双击,打开工程。
打开 control.h 头文件,加入以下外部变量声明,以便我们在其他地方调用:
extern float g_fAccAngle;//加速度传感器经过atan2()解算得到的角度
extern float g_fGyroAngleSpeed;//陀螺仪角速度
extern float g_fCarAngle;//小车倾角

然后在 main.c 文件中,把我们想要显示的数据放到主循环中,这样不会影响中断的运行。
printf("$%.1f %.1f %.1f;", g_fAccAngle, g_fGyroAngleSpeed ,g_fCarAngle);
可以看到,我们这里要显示的就是刚才外部声明过的变量,分别是加速度计算得到的角度、陀螺仪角速度、数据融合后的小车角度,这里要注意,因为我们的这里写的顺序是 g_fAccAngle、g_fGyroAngleSpeed、g_fCarAngle,即 g_fAccAngle 对应通道0、g_fGyroAngleSpeed 对应通道1、 g_fCarAngle 对应通道3。通道是从0开始数的。如果你在后面加上其他数据,则依次类推。
用数据线连接小车核心板和电脑USB接口,先解压喵呜地面站压缩包(切勿直接在压缩包内双击EXE文件,无法运行的),然后再打开喵呜地面站。这时,软件能自动识别出小车串口,如图所示。

在连接好小车核心板和电脑时,如果喵呜地面站无法识别串口,那么关闭软件重新打开即可。
点击左上角三角形运行按钮,软件则开始接受小车发送过来的数据,晃动小车,则可以显示出波形,在默然情况下,Y轴不会自动缩放波形,这时点击左侧“自动缩放Y轴按钮”,则可以自动缩放波形。
点击运行旁边的按钮,则可以进行暂停。

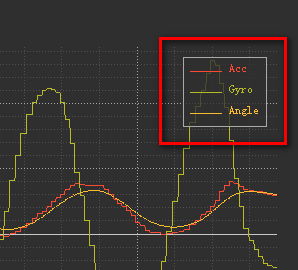
我们已知三条曲线分别为加速度、陀螺仪和角度,那么可以双击绘图区右上角通道名称对波形进行重命名。如图所示。
把鼠标指针放在波形中,滑动鼠标滚轮,则可以对图形进行放大缩小。
点击保持为PNG,则可以把当前波形图保存为PNG图片,并保持在喵呜地面站文件夹内。