自平衡小车速度控制原理与串级PID
通常在三轮小车、四轮小车中,我们使用 PID 进行速度控制,大部分都是负反馈。但是两轮自平衡小车的速度控制不大一样,不是负反馈,而是正反馈,因为小车的两个电机需要进行直立控制的同时去进行速度控制。
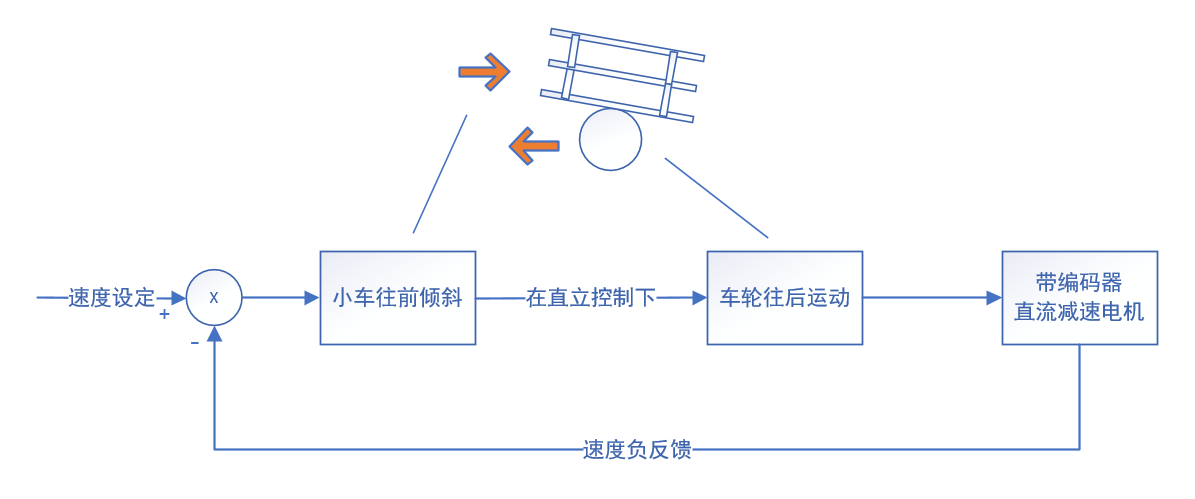
我们先使用常规的速度负反馈算法试一下,看在平衡小车上面是否有效果。首先我们给定一个目标速度值,由于在直立控制的作用下,此时小车要向前倾斜以获取加速度,车轮需要往后运动,这样小车的速度就会下降。因为是负反馈,速度下降之后,速度控制的偏差增大,小车往前倾斜的角度增大,如此反复,小车便会倒下。常规的速度负反馈在直立控制的影响下起到了正反馈效果。如下图所示。
根据以上的分析,在直立控制里面加入速度负反馈无法达到速度闭环的目的,而且还会破坏直立控制系统。下面我们换一种思路。
为保证直立控制的优先级,我们把速度控制放在直立控制的前面,也就是速度控制调节的结果仅仅是改变直立控制的目标值。因为根据经验可知,小车的运行速度和小车的倾角是相关的。比如要提高小车向前行驶的速度,就需要增加小车向前倾斜的角度,倾斜角度加大之后,车轮在直立控制的作用下需要向前运动保持小车平衡,速度增大;如果要降低小车向前行驶的速度,就需要减小小车向前的倾斜角度,倾斜角度减小之后,车轮在直立控制的作用下向后运动保持小车平衡,速度减小。如下图所示。

根据上面的原理图,我们把速度和直立两个控制器串联起来工作,其中速度控制的输出作为直立控制的输入,而直立控制的输出作为系统的输出,这其实就是一个串级控制系统。直立控制在前面有介绍,使用的 PD 控制。因为编码器可能存在的噪声,为防止噪声被放大并消除系统的静差,这里我们速度控制使用 PI 控制。
式(1)为直立控制算法,式(2)为速度控制算法。 是角度,是角速度, 是速度控制偏差、是速度控制偏差的积分。为了方便我们后面的 PID 参数的整定,可以对控制系统做进一步的简化。和并式(1)和式(2)得到式(3)
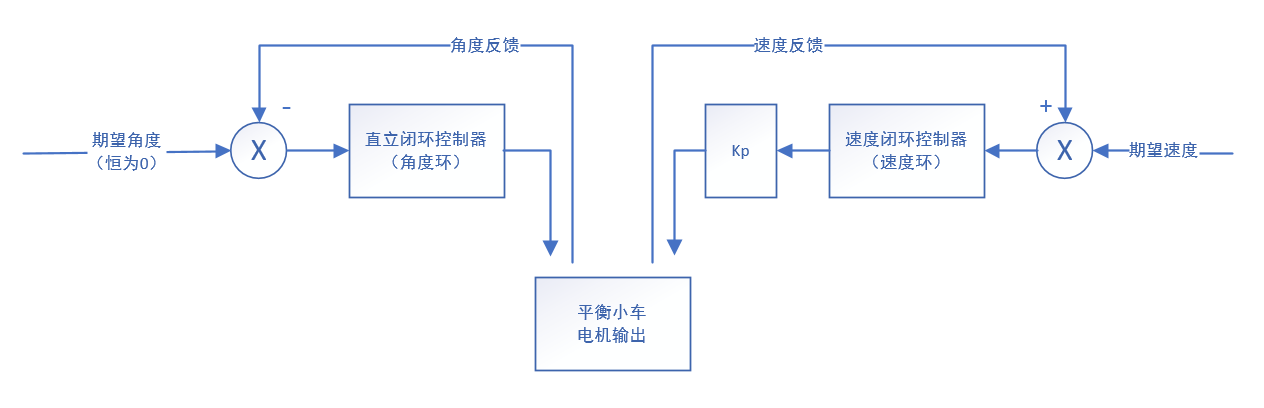
至此,我们得到了让小车保持直立且速度为给定值的控制算法,由一个负反馈的直立 PD 控制器和一个正反馈的速度 PI 控制器组成。控制原理图进行的演变,如下图所示。
因为常规的速度控制都是负反馈,为了验证在这里的速度控制器确实是正反馈,我们可以做一个小实验。首先把式(3)中直立控制部分屏蔽,只留下速度控制部分,得到式(4)。
在代码中屏蔽直立控制和转向控制,可以直接在电机输出函数中进行屏蔽。
void MotorOutput(void)
{
//这里的电机输出等于角度环控制量 + 速度环外环,这里的 - g_fSpeedControlOut 是为了表明速度环的极性跟角度环不一样,角度环是负反馈,速度环是正反馈
//直接在电机输出函数中只保留速度控制。其他控制不叠加,进行屏蔽。
g_fLeftMotorOut = - g_fSpeedControlOut ;
g_fRightMotorOut = - g_fSpeedControlOut ;
//g_fLeftMotorOut = g_fAngleControlOut - g_fSpeedControlOut - g_fBluetoothDirection ;
//g_fRightMotorOut = g_fAngleControlOut - g_fSpeedControlOut + g_fBluetoothDirection ;
/*增加死区常数*/
if((int)g_fLeftMotorOut>0) g_fLeftMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fLeftMotorOut<0) g_fLeftMotorOut -= MOTOR_OUT_DEAD_VAL;
if((int)g_fRightMotorOut>0) g_fRightMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fRightMotorOut<0) g_fRightMotorOut -= MOTOR_OUT_DEAD_VAL;
/*输出饱和处理,防止超出PWM范围*/
if((int)g_fLeftMotorOut > MOTOR_OUT_MAX) g_fLeftMotorOut = MOTOR_OUT_MAX;
if((int)g_fLeftMotorOut < MOTOR_OUT_MIN) g_fLeftMotorOut = MOTOR_OUT_MIN;
if((int)g_fRightMotorOut > MOTOR_OUT_MAX) g_fRightMotorOut = MOTOR_OUT_MAX;
if((int)g_fRightMotorOut < MOTOR_OUT_MIN) g_fRightMotorOut = MOTOR_OUT_MIN;
SetMotorVoltageAndDirection((int)g_fLeftMotorOut,(int)g_fRightMotorOut);
}
我们直接在小车上进行算法验证。使用一款调试好的小车,屏蔽程序中的直立控制和转向控制,在车轮悬空的时候给它一个干扰(就是用手给它拨一下),可以看到车轮在受干扰之后沿相同的转动方向不断增大,直到饱和。这是典型的正反馈现象。最终,速度控制的偏差经过积分和比例直接叠加在电机控制量上。速度控制在刚开始讨论的时候是通过调节小车倾角来实现,通过上面的简化和改进,最后已经演变成对电机的直接控制了。
虽然最后我们没有直接使用串级控制系统,但是经过我们的实验,直接串级 PID 对两轮自平衡小车的直立和速度进行控制也是可以的,并且,在串级 PID 控制系统里面,速度控制是负反馈(详见第二张控制图)。