硬件I2C读取MPU6050原始数据
本小节教你使用 STM32CubeMX 配置 STM32 的 硬件 I2C,并通过 I2C 读取 MPU-6050 传感器的陀螺仪、加速度计数据。
预先了解
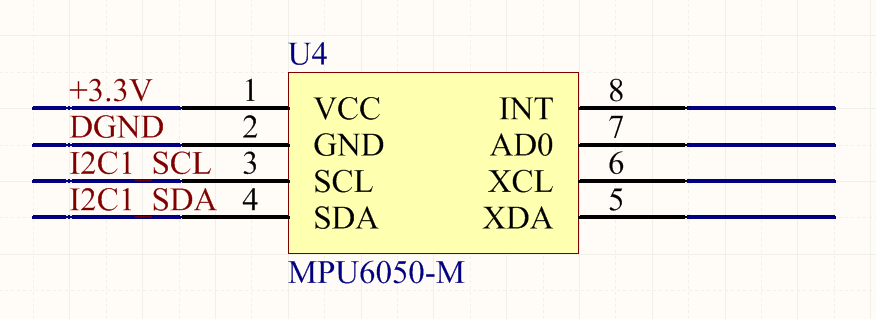
通过上面原理图得知,「小霸王Lite」两轮自平衡小车通过 STM32 的 I2C1 接口与 MPU-6050 传感器进行通信。我们这里使用的是轮询模式,只需要配置 PB8:I2C1_SCL、PB9:I2C1_SDA。如果使用中断模式,则还要使用一个 GPIO 引脚连接 MPU-6050 模块的 INT 引脚。
具体步骤
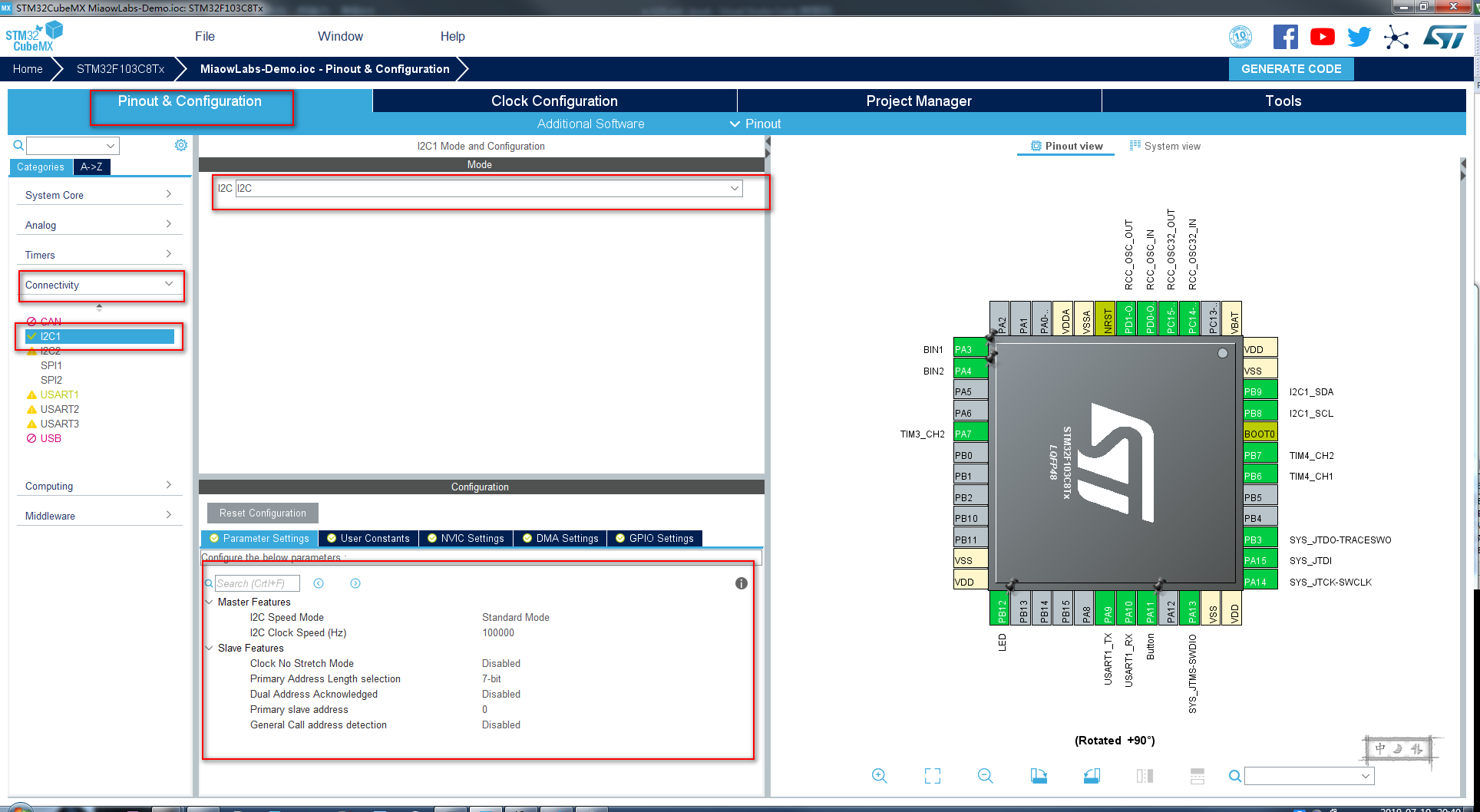
进入我们上一小节修改过的 MiaowLabs-Demo 文件夹,找到 MiaowLabs-Demo.ioc 工程文件,双击,打开工程。在左侧 Pinout&Configuration 界面中的 Connectivity 下拉中点击 I2C1,然后在 I2C1 Mode and Configuration 的 Mode 中将 I2C 选择为 I2C。而其他地方,比如 Configuration 中的 Parameter Setting 选项卡全部保持默认参数(标准模式,100k 速率)即可。
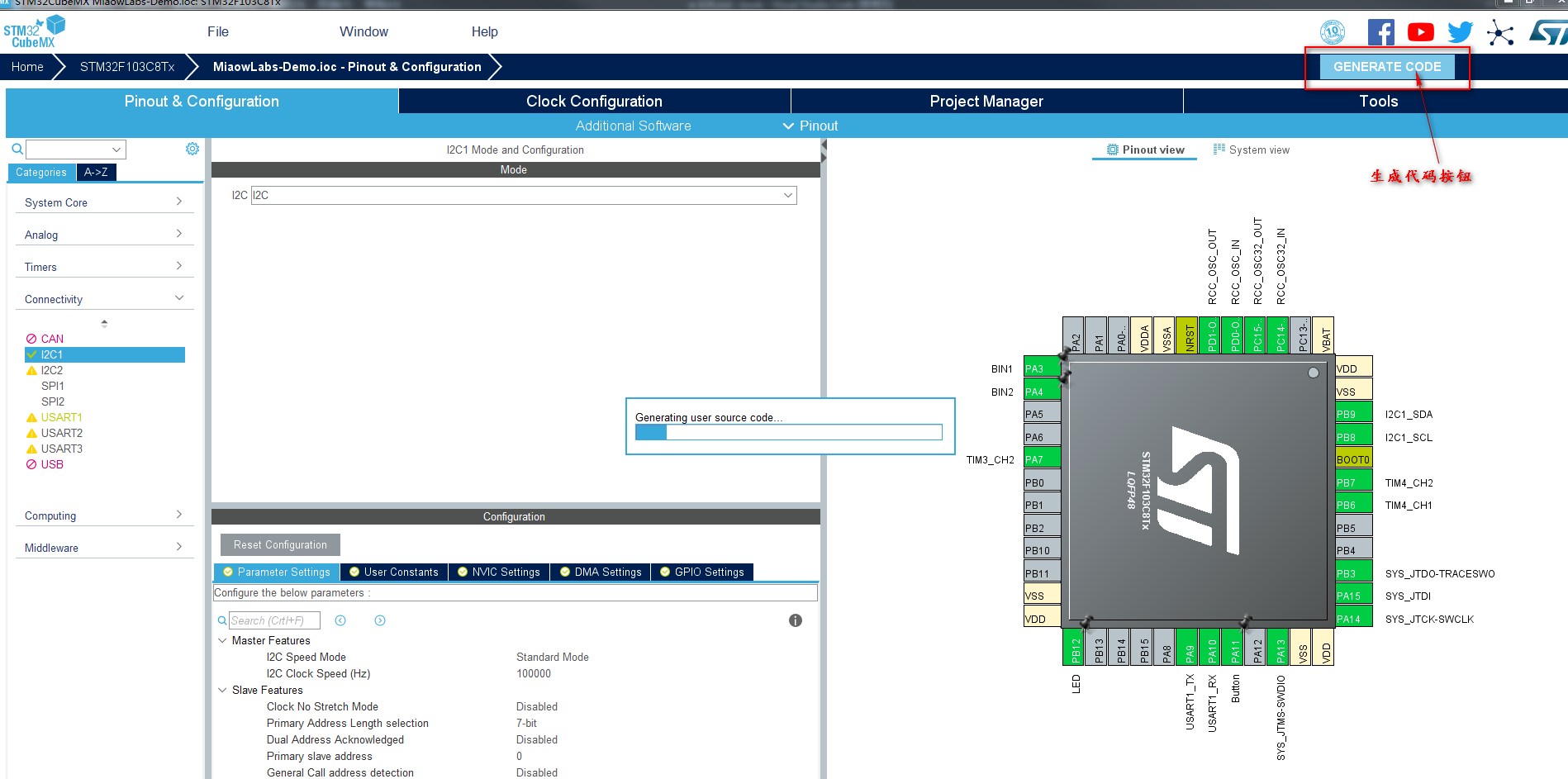
点击 GENERATE CODE,重新生成代码。
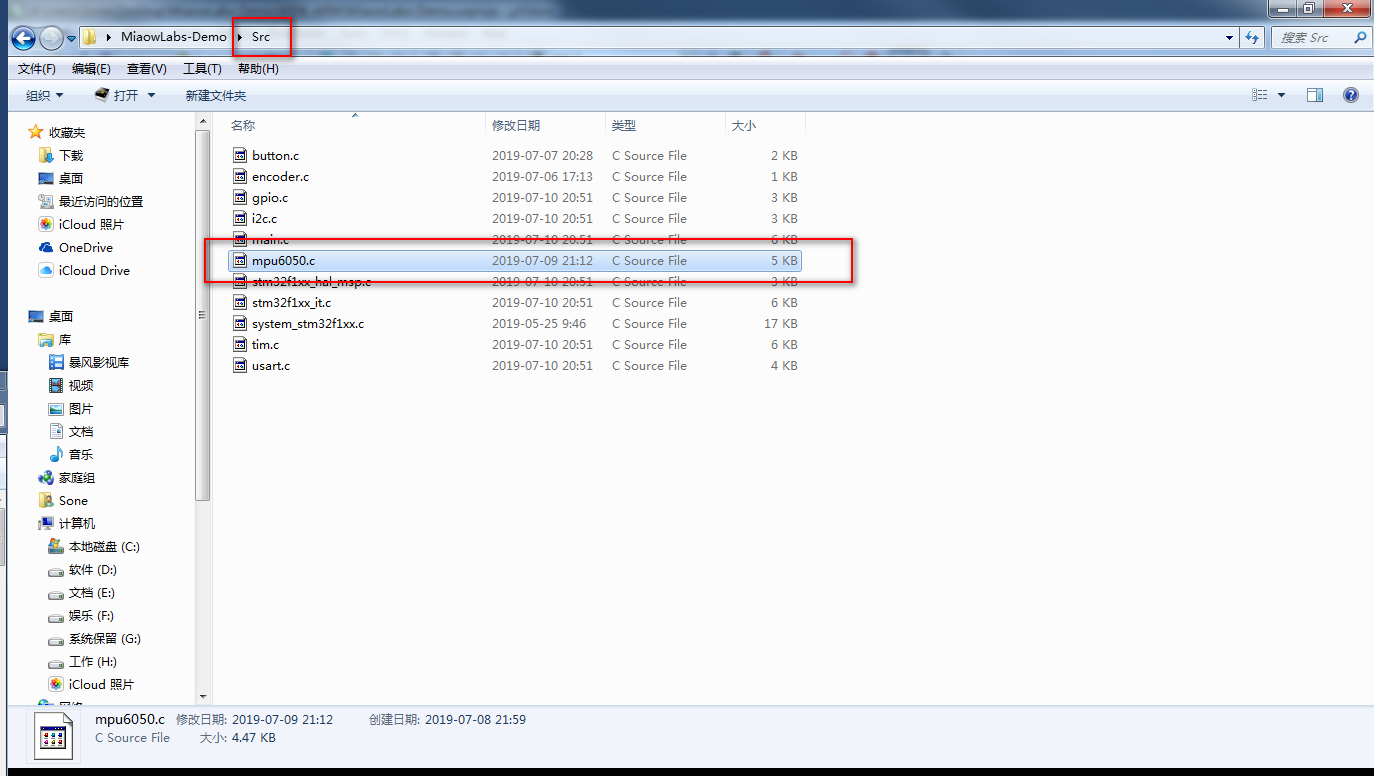
从光盘中(路径:光盘\03、教程\03、配套教程的API文件\),找到已经用 STM32 HAL 库封装好的 MPU6050 代码文件: mpu6050.c、mpu6050.h,这两个文件主要就是使用 HAL 库里的 I2C 函数进行改写,可以直接调用。
将 mpu6050.c ,复制到 MiaowLabs-Demo 文件夹的 Src 文件夹里。
将 mpu6050.h 复制到 MiaowLabs-Demo 文件夹的 Inc 文件夹里。
打开 MDK-ARM 软件,在左侧目录中双击 Application/User,将 Src 文件夹的 mpu6050.c 加入工程。
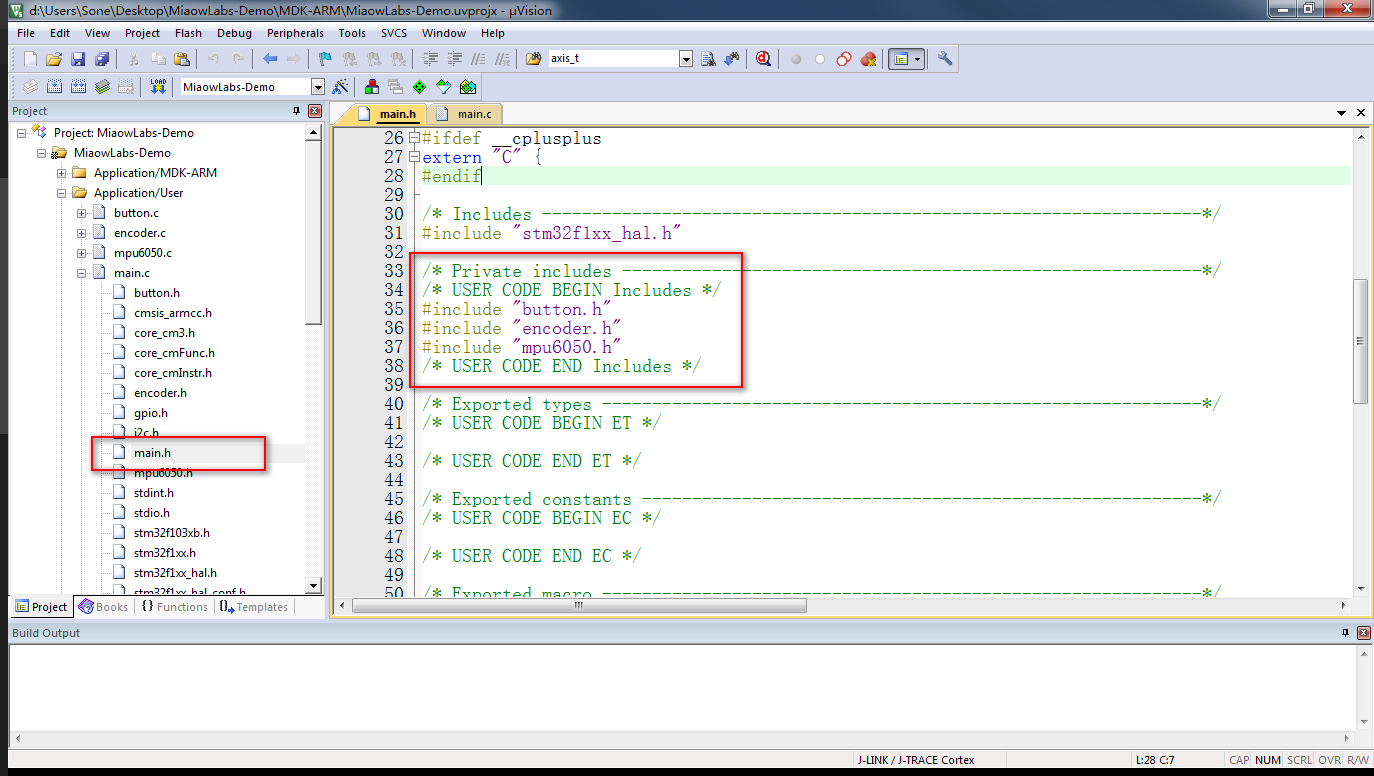
打开 main.h 头文件,在 /* USER CODE BEGIN Includes */ 和 /* USER CODE END Includes */ 之间加入 mpu6050.h 文件:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "button.h"
#include "encoder.h"
#include "mpu6050.h"
/* USER CODE END Includes */
打开 main.c 文件,在 /* USER CODE BEGIN 1 */ 和 /* USER CODE END 1 */ 之间定义以下新变量,并且将上个实验的变量注释掉:
/* USER CODE BEGIN 1 */
//int iTempTim4Encoder;///临时存放从TIM4编码器接口捕获到的脉冲数据
short accx,accy,accz;//加速度x轴、y轴、z轴数据
short gyrox,gyroy,gyroz;//陀螺仪x轴、y轴、z轴数据
/* USER CODE END 1 */
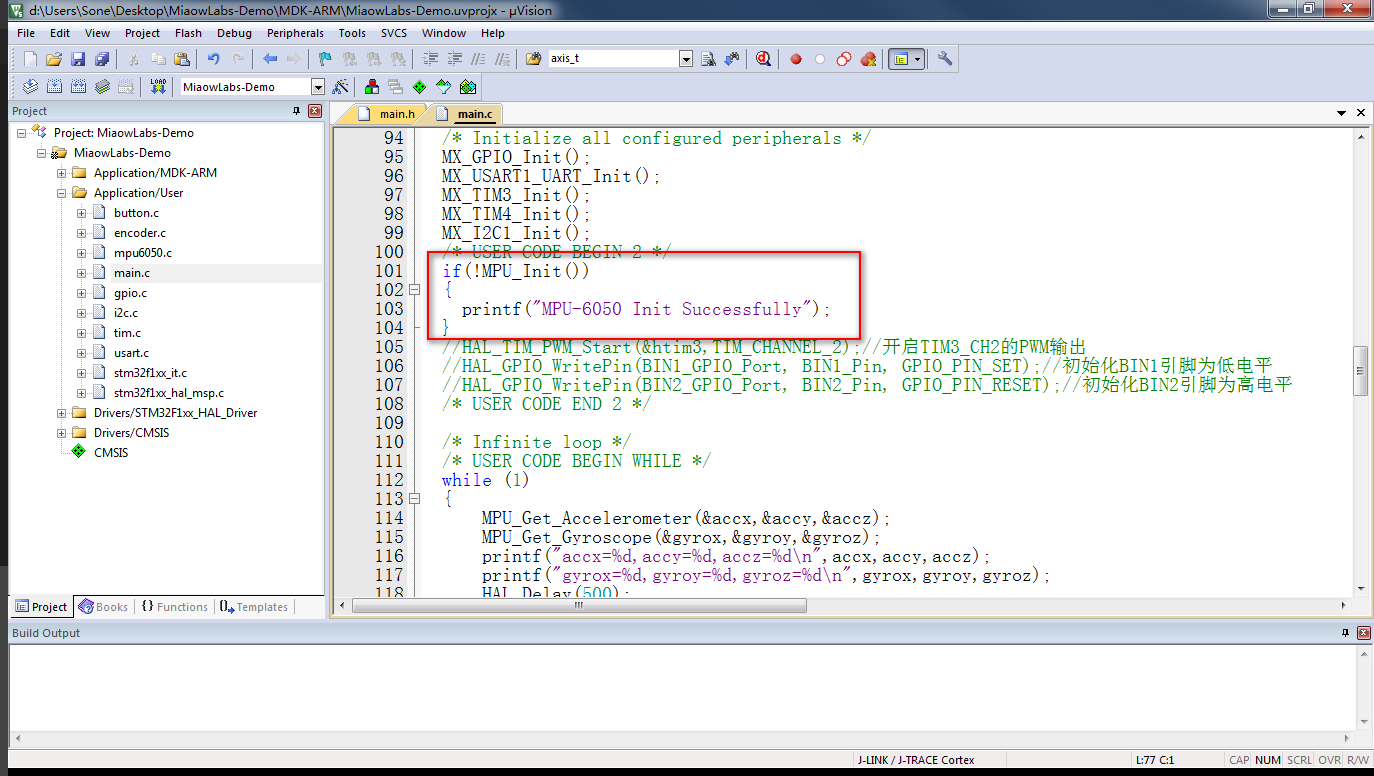
在 /* USER CODE BEGIN 2 */ 和 /* USER CODE END 2 */ 之间敲入以下新代码,注释掉上个实验留下的代码:
/* USER CODE BEGIN 2 */
if(!MPU_Init())//如果MPU6050初始化成功,返回0,!0则为1
{
printf("MPU-6050 Init Successfully");//成功了则打印 MPU-6050 Init Successfully
}
//HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启TIM3_CH2的PWM输出
//HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET);//初始化BIN1引脚为低电平
//HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET);//初始化BIN2引脚为高电平
/* USER CODE END 2 */
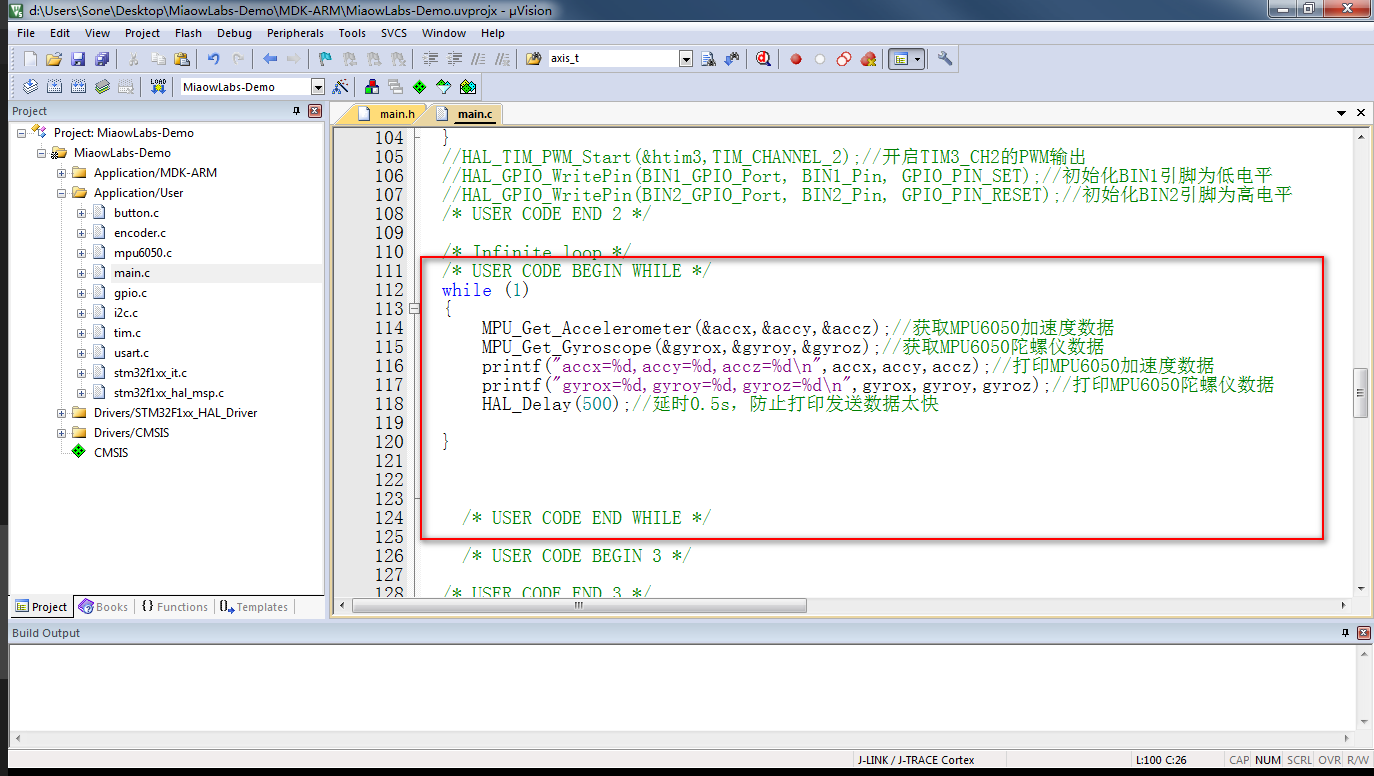
在主循环中敲入以下代码:
/* USER CODE BEGIN WHILE */
while (1)
{
MPU_Get_Accelerometer(&accx,&accy,&accz);//获取MPU6050加速度数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz);//获取MPU6050陀螺仪数据
printf("accx=%d,accy=%d,accz=%d\n",accx,accy,accz);//打印MPU6050加速度数据
printf("gyrox=%d,gyroy=%d,gyroz=%d\n",gyrox,gyroy,gyroz);//打印MPU6050陀螺仪数据
HAL_Delay(500); //延时0.5s,防止打印发送数据太快
}
/* USER CODE END WHILE */
在 MDK-ARM 中重新编译代码,把代码烧录进小车的 MiaowLabs-STM32F1-Micro 核心板(小车提前组装好),并用数据线连接核心板和电脑,打开喵呜地面站或其他串口助手软件,我们用手按一下核心板的复位按钮,能够看到小车发送 MPU-6050 Init Successfully 到串口助手上,代表 MPU6050 初始化成功,而且每隔 0.5 秒就将加速度和陀螺仪数据发送上去,我们转动小车可以看到数据随之变化。
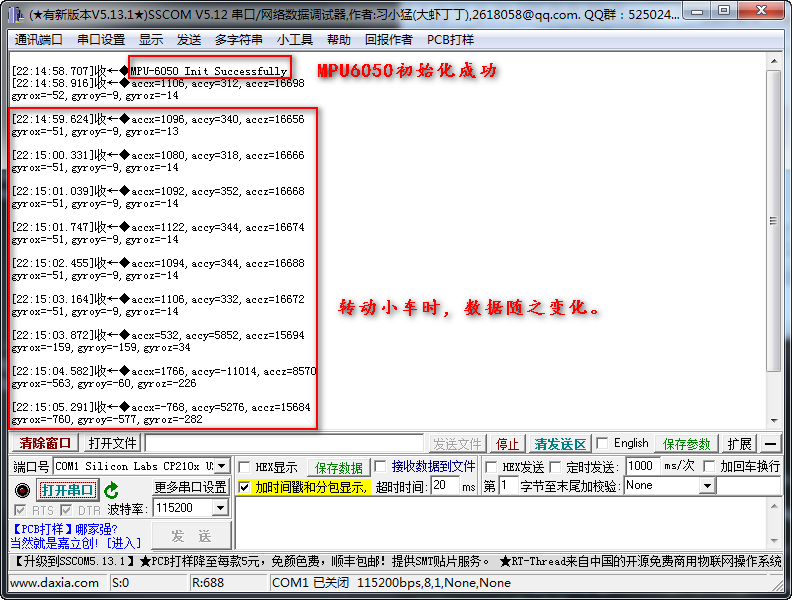
就这样,我们成功读取了 MPU6050 传感器的原始数据。