添加超声波跟随功能
通过上两小节的学习,我们学到了如何使用超声波探测前方障碍物距离,和添加超声波避障相关算法代码。
因为我们在上一小节已经把超声波避障和跟随的代码都写好了,在这小节中,我们只需要把开机模式设成跟随就可以了。
我们打开 manage.c 源文件,然后把开机模式从超声波避障模式改成跟随模式就可以了。
unsigned char g_CarRunningMode = ULTRA_AVOID_MODE;//超声波避障模式
改成
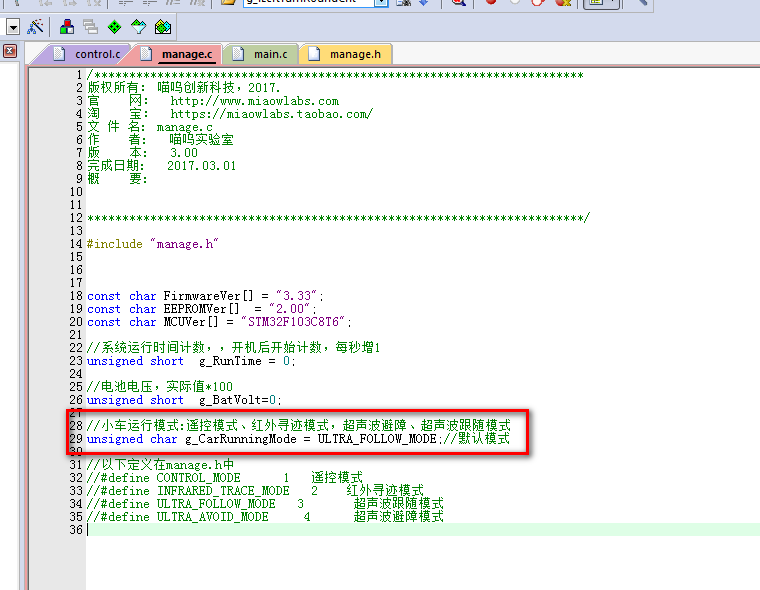
unsigned char g_CarRunningMode = ULTRA_FOLLOW_MODE;//超声波跟随模式
如下图所示:
修改好后,重新编译代码,下载到小车里,放在空旷地面,扶正车体,开机,把手放在超声波模块前,可以看到小车在探测到手掌距离小于12cm时会后退,当探测到手掌距离大于18cm且小于30cm时会跟随手掌前进。