添加蓝牙遥控
本小节教你给两轮自平衡小车添加蓝牙遥控功能。
实验目的:通过串口助手发送指令,接收蓝牙返回的指令并打印在串口助手,实现对蓝牙相关数据的更改。Usart1 用于串口通讯,Usart3 用于蓝牙通讯,本程序使用串口中断模式发送与接收。
了解硬件
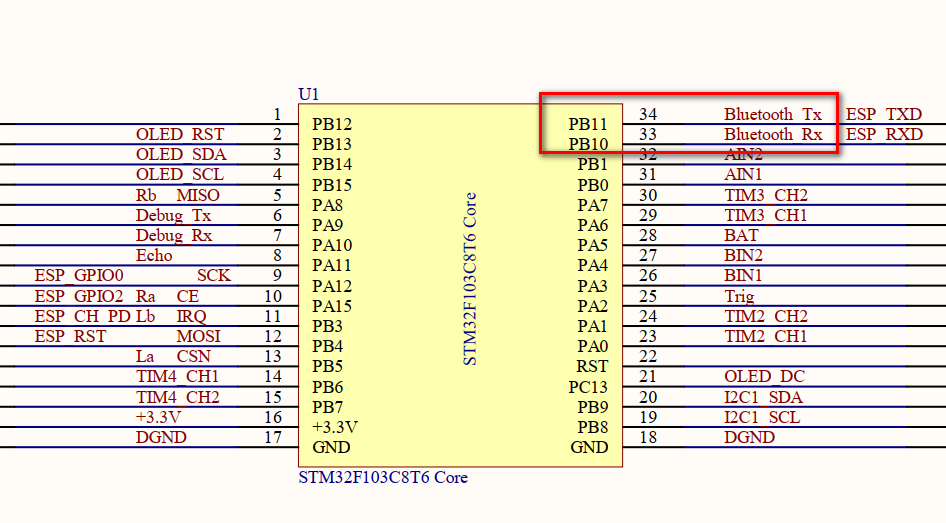
在配置 STM32CubeMX 之前,首先要弄清楚要配置哪些引脚和功能。通过查阅底板原理图,可以得知两轮自平衡小车的蓝牙模块 BT-06 是一个蓝牙从机模块,也是一个蓝牙传透模块,它连接了 STM32 的 USART3,即 PB10/PB11。所谓蓝牙从机模块,指的是该模块不能去搜索其他蓝牙设备,只能由其他蓝牙设备主动去连接它,它是被动的。
在使用方式上,BT-06 模块跟 USB-TTL 模块是一样的。
配置STM32CubeMX
我们之前的实验已经配置过 USART1 了,配置 USART3 也是类似的操作。
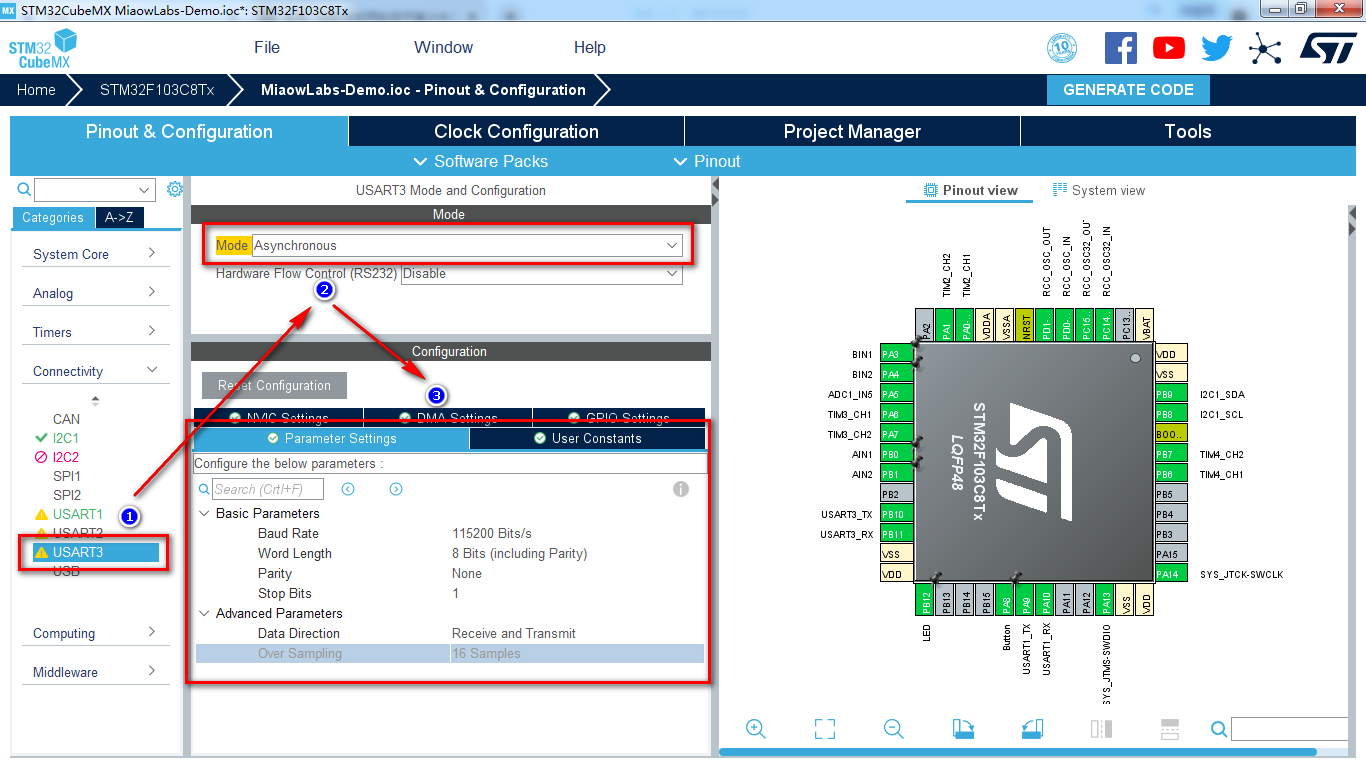
配置 USART3,其中 Mode 选择 Asynchronous,即异步通信。然后,在 Parameter Setting 中设置串口波特率为 115200 Bits/s,传输数据长度为8 Bit。奇偶检验无,停止位1。其他参数默认。如下图所示。
接着,在 NVIC Settings 中勾选 USART3 global interrupt。
然后点击 GENERATE CODE,生成代码。