添加超声波避障模式
在上一小节中,我们已经成功驱动超声波模块,并测到前方障碍物的距离。我们可以进一步利用超声波模块,编写相关避障算法,使小车在探测到前方障碍物时自动转向。
新建一个文件,保存到工程的 Src 文件夹中,命名为 manage.c,记得要将该文件加入到工程的 Application/User 组中。
敲入以下代码:
#include "manage.h"
const char FirmwareVer[] = "3.33";
const char EEPROMVer[] = "2.00";
const char MCUVer[] = "STM32F103C8T6";
//系统运行时间计数,,开机后开始计数,每秒增1
unsigned short g_RunTime = 0;
//电池电压,实际值*100
unsigned short g_BatVolt=0;
//小车运行模式:遥控模式、红外寻迹模式,超声波避障、超声波跟随模式
unsigned char g_CarRunningMode = ULTRA_AVOID_MODE;//默认模式
//以下定义在manage.h中
//#define CONTROL_MODE 1 遥控模式
//#define INFRARED_TRACE_MODE 2 红外寻迹模式
//#define ULTRA_FOLLOW_MODE 3 超声波跟随模式
//#define ULTRA_AVOID_MODE 4 超声波避障模式
接着,新建一个头文件,保存到工程的 inc 文件夹中,命名为 manage.h。
敲入以下代码:
#ifndef _MANAGE_H
#define _MANAGE_H
#define CONTROL_MODE 1
#define INFRARED_TRACE_MODE 2
#define ULTRA_FOLLOW_MODE 3
#define ULTRA_AVOID_MODE 4
extern const char FirmwareVer[];
extern const char EEPROMVer[];
extern const char MCUVer[];
extern unsigned short g_RunTime;
extern unsigned short g_BatVolt;
extern unsigned char g_CarRunningMode;
#endif
回到 control.c 源文件中,在开头变量定义中,添加以下三个变量:
float g_fBluetoothDirection;
int g_iLeftTurnRoundCnt = 0;
int g_iRightTurnRoundCnt = 0;
在 void GetMotorPulse(void)函数中,进行改造代码:
void GetMotorPulse(void)//读取电机脉冲
{
g_nRightMotorPulse = (short)(__HAL_TIM_GET_COUNTER(&htim4));//获取计数器值
g_nRightMotorPulse = (-g_nRightMotorPulse);
__HAL_TIM_SET_COUNTER(&htim4,0);//TIM4计数器清零
g_nLeftMotorPulse = (short)(__HAL_TIM_GET_COUNTER(&htim2));//获取计数器值
__HAL_TIM_SET_COUNTER(&htim2,0);//TIM2计数器清零
g_lLeftMotorPulseSigma += g_nLeftMotorPulse;//速度外环使用的脉冲累积
g_lRightMotorPulseSigma += g_nRightMotorPulse;//速度外环使用的脉冲累积
g_iLeftTurnRoundCnt -= g_nLeftMotorPulse;
g_iRightTurnRoundCnt -= g_nRightMotorPulse;
}
在 void MotorOutput(void) 函数中,同样进行改造:
void MotorOutput(void)//电机输出函数,将直立控制、速度控制、方向控制的输出量进行叠加,并加入死区常量,对输出饱和作出处理。
{
g_fLeftMotorOut = g_fAngleControlOut - g_fSpeedControlOut - g_fBluetoothDirection ; //这里的电机输出等于角度环控制量 + 速度环外环,这里的 - g_fSpeedControlOut 是因为速度环的极性跟角度环不一样,角度环是负反馈,速度环是正反馈
g_fRightMotorOut = g_fAngleControlOut - g_fSpeedControlOut + g_fBluetoothDirection ;
/*增加电机死区常数*/
if((int)g_fLeftMotorOut>0) g_fLeftMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fLeftMotorOut<0) g_fLeftMotorOut -= MOTOR_OUT_DEAD_VAL;
if((int)g_fRightMotorOut>0) g_fRightMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fRightMotorOut<0) g_fRightMotorOut -= MOTOR_OUT_DEAD_VAL;
/*输出饱和处理,防止超出PWM范围*/
if((int)g_fLeftMotorOut > MOTOR_OUT_MAX) g_fLeftMotorOut = MOTOR_OUT_MAX;
if((int)g_fLeftMotorOut < MOTOR_OUT_MIN) g_fLeftMotorOut = MOTOR_OUT_MIN;
if((int)g_fRightMotorOut > MOTOR_OUT_MAX) g_fRightMotorOut = MOTOR_OUT_MAX;
if((int)g_fRightMotorOut < MOTOR_OUT_MIN) g_fRightMotorOut = MOTOR_OUT_MIN;
SetMotorVoltageAndDirection((int)g_fLeftMotorOut,(int)g_fRightMotorOut);
}
添加量程处理函数Scale()和遥控速度及方向处理函数Steer(),还有超声波相关函数UltraControl(),如下图所示:
/***************************************************************
** 函数名称: Scale
** 功能描述: 量程处理
** 输 入:
** 输 出:
** 全局变量:
** 作 者: 喵呜实验室MiaowLabs
** 淘 宝: https://miaowlabs.taobao.com/
** 日 期: 2014年08月01日
***************************************************************/
float Scale(float input, float inputMin, float inputMax, float outputMin, float outputMax) {
float output;
if (inputMin < inputMax)
output = (input - inputMin) / ((inputMax - inputMin) / (outputMax - outputMin));
else
output = (inputMin - input) / ((inputMin - inputMax) / (outputMax - outputMin));
if (output > outputMax)
output = outputMax;
else if (output < outputMin)
output = outputMin;
return output;
}
/***************************************************************
** 函数名称: Steer
** 功能描述: 遥控速度及方向处理函数
** 输 入:
** 输 出:
** 全局变量:
** 作 者: 喵呜实验室MiaowLabs
** 淘 宝: https://miaowlabs.taobao.com/
** 日 期: 2014年08月01日
***************************************************************/
void Steer(float direct, float speed)
{
if(direct > 0)
g_fBluetoothDirection = Scale(direct, 0, 10, 0, 400);
else
g_fBluetoothDirection = -Scale(direct, 0, -10, 0, 400);
if(speed > 0)
g_iCarSpeedSet = Scale(speed, 0, 10, 0, 70);
else
g_iCarSpeedSet = -Scale(speed, 0, -10, 0, 70);
}
/***************************************************************
** 作 者: Songyibiao
** 官 网:http://www.miaowlabs.com
** 淘 宝:https://miaowlabs.taobao.com/
** 日 期: 20160415
** 函数名称: UltraControl
** 功能描述: 超声波跟随/避障
** 输 入:
** 输 出:
** 备 注:
********************喵呜实验室MiaowLabs版权所有**************************/
void UltraControl(int mode)
{
if(mode == 0)//跟随模式
{
if((Distance >= 0) && (Distance<= 12))
{//距离小于12cm则后退
Steer(0, -4);
}
else if((Distance> 18) && (Distance<= 30))
{//距离大于18cm且小于30则前进
Steer(0, 4);
}
else
Steer(0, 0);
}
else if(mode == 1)//避障模式
{
if((Distance >= 0) && (Distance<= 15))//这里设置成探测到障碍物距离为0到15cm,就右转避开
{
Steer(5, 0);
g_iLeftTurnRoundCnt = 500;//右转550个脉冲计数,转弯角度约为90度,这个数值根据实际转向情况调节
g_iRightTurnRoundCnt = -500;//同上
}
if((g_iLeftTurnRoundCnt < 0)&&(g_iRightTurnRoundCnt > 0))
{
Steer(0, 4);
}
}
}
在main.h中添加manage.h头文件,如下图所示。
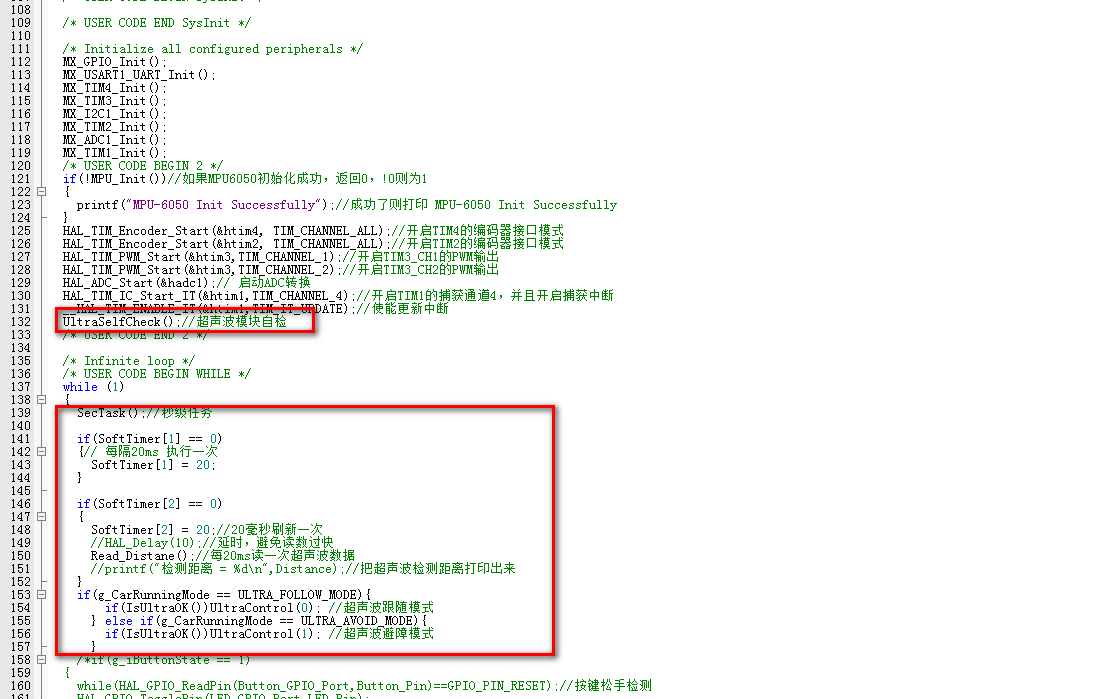
在main.c函数中添加相关代码:
if(!MPU_Init())//如果MPU6050初始化成功,返回0,!0则为1
{
printf("MPU-6050 Init Successfully");//成功了则打印 MPU-6050 Init Successfully
}
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL);//开启TIM4的编码器接口模式
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);//开启TIM2的编码器接口模式
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);//开启TIM3_CH1的PWM输出
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启TIM3_CH2的PWM输出
HAL_ADC_Start(&hadc1);// 启动ADC转换
HAL_TIM_IC_Start_IT(&htim1,TIM_CHANNEL_4);//开启TIM1的捕获通道4,并且开启捕获中断
__HAL_TIM_ENABLE_IT(&htim1,TIM_IT_UPDATE);//使能更新中断
UltraSelfCheck();//超声波模块自检
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
SecTask();//秒级任务
if(SoftTimer[1] == 0)
{// 每隔20ms 执行一次
SoftTimer[1] = 20;
}
if(SoftTimer[2] == 0)
{
SoftTimer[2] = 20;//20毫秒刷新一次
//HAL_Delay(10);//延时,避免读数过快
Read_Distane();//每20ms读一次超声波数据
//printf("检测距离 = %d\n",Distance);//把超声波检测距离打印出来
}
if(g_CarRunningMode == ULTRA_FOLLOW_MODE){
if(IsUltraOK())UltraControl(0); //超声波跟随模式
} else if(g_CarRunningMode == ULTRA_AVOID_MODE){
if(IsUltraOK())UltraControl(1); //超声波避障模式
}
}
至此,代码添加完毕。
重新编译代码,然后烧录进小车内。把小车放到空旷地面,扶正,开机,当小车前行时,用手掌在前方15cm内阻挡超声波,可以看到小车自动右转避开。